로봇 광섬유 배열 피부에 대한 지각 메커니즘 및 실험 연구
소환
宋金雪(송진설). (2016).机器人光纤阵列皮肤感知机理及实验研究( 로봇 광섬유 배열 피부에 대한 인식 메커니즘 및 실험 연구 ) [硕士school位论文] ([석사 학위 논문]). 山东대학([산동대학교]).
키워드
- 机器人 / 로봇
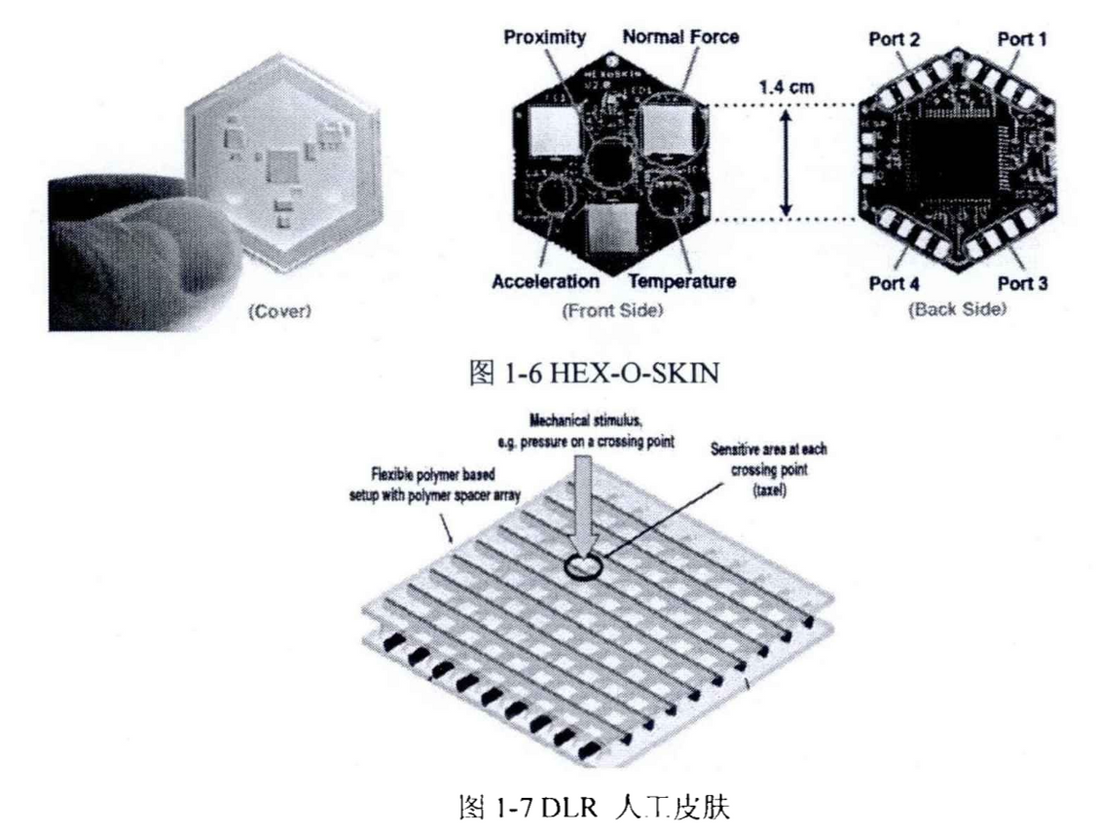
- 人工皮肤 / 인공피부
- 光纤阵列皮肤 / 광섬유 배열 피부
- 光纤布拉格光栅 / 파이버 브래그 격자 - FBG
- 感知机리 / 지각 메커니즘
- 实验研究 / 실험연구
- 人机协작품안전 / 인간-기계 협력 보안
- 光纤 / 광섬유
짧은
송진쉐의 석사학위 논문은 광섬유 어레이를 이용한 로봇 인공 피부의 지각 메커니즘과 실험 연구 에 초점을 맞추고 있으며 , 특히 광섬유 브래그 격자 감지 기술을 적용하여 인간-로봇 협력에서 충돌 감지에 대한 잠재력을 탐구하고 있습니다.
요약
송진쉐(Song Jin-xue) 의 석사학위 논문 (2016)은 광섬유 어레이를 활용한 로봇 인공 피부의 인지 메커니즘과 실험 연구를 조사하며 , 특히 인간-로봇 협력 보안에서 충돌 문제를 해결하는 데 초점을 맞추고 있습니다. 이 연구는 소형, 경량, 고감도, 전자기 간섭 방지와 같은 광섬유 의 장점을 활용하여 소형화되고 통합된 인공 피부를 제작합니다. 이 논문은 로봇 인공 피부에 광섬유 브래그 격자(FBG) 센서를 적용하여 횡방향 및 축방향 변형 감지 원리를 검토합니다 . 이 작업에는 ANSYS를 사용한 촉각 감지 장치용 미세 구조의 설계 및 시뮬레이션 , 3x3 어레이 센서 의 제작 및 실험 테스트 , 신호 복조 기술 개발 , 개발된 광섬유 어레이 감지 장치를 실리콘 장갑에 적용하여 파지력 감지에 대한 타당성을 테스트하는 것이 포함됩니다 . 이 연구의 궁극적인 목적은 로봇 인공 피부에 광섬유 어레이 감지 기술을 적용하여 인간-로봇 상호작용의 안전성을 향상시키는 것의 타당성을 검증하는 것입니다.
기원: